Home
- POV-Ray Tutorial
- POV-Ray Beispiele
Inhaltsübersicht
- Geometrie
- Architektur
- Technik
- Leiter
- Masten
- Geländer
- Brücke
- Röhren
- Rohrabzweigung
- Rohr-Absperrhahn
- Kette
- Drahtspule
- Torpedo
- Cruise Missile
- Rakete
- Rad
- Truck
- 1. Chassis
- 2. Karosserie
- 3. Zugmaschine
- 4. mit Anhänger
- Propeller
- Flugzeug
- Kanu
- Gitarrenbody
- 7-Segment Display
- Flachbandkabel
- Kabelbaum
|
|
Truck - 1. Räder und Chassis
Objekte: "torus", "cylinder", "sphere".
Methoden: "intersection", "union", "#declare", "#macro".
|
|
|
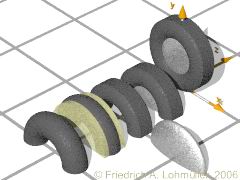
Ein einfacher Autoreifen
Die einfache Konstruktion wird mit dem nebenstehenden Bild erklärt:
//------------------------ object Wheel
#declare Wheel =
union{
intersection{
torus{ 0.35,0.15 rotate<90,0,0> }
cylinder{ <0,0,-0.20>,<0,0,0.2>,0.47}
texture{ pigment{ color rgb<1,1,1>*0.15}
normal { bumps .5 scale .005}
finish { diffuse .9 phong .2}
} // end of texture
}// end intersection
sphere{ <0,0,0>,0.45
scale<1,1,0.25>
texture {
Chrome_Metal
normal{ bumps 0.5 scale 0.005}
finish{ diffuse 0.9 phong 0.5}
} // end of texture
} // end of sphere ---------------------
translate<0,0.45,0>
} // end of union --------- end of Wheel
//---------------------------------------
object{ Wheel translate<0,0,0>}
//---------------------------------------
|
|
|
|
Chassis mit
Doppelreifen und Doppelachse:
#declare Half = 1.00;
// = halbe Spurweite
#declare Axis_Distance = 3.50;
#declare Wheel_Angle = 30;
#declare Wheel_D= //------ Doppelreifen
union{
object{ Wheel translate<0,0,-0.15>}
object{ Wheel translate<0,0, 0.15>}
} //--------------------------------------
#declare Double_Axes = //----- Doppelachse
union{
object{ Wheel_D translate<-0.6,0,-Half>}
object{ Wheel_D translate<-0.6,0, Half>}
object{ Wheel_D translate<+0.6,0,-Half>}
object{ Wheel_D translate< 0.6,0, Half>}
} //--------------------------------------
#macro Chassis (Front_Wheel___Angle)
//------------------------------ Chassis
union{
object{ Wheel
rotate<0,Front_Wheel___Angle,0>
translate< 0,0,-Half>}
object{ Wheel
rotate<0,Front_Wheel___Angle,0>
translate< 0.00,0, Half>}
object{ Double_Axes
translate<-Axis_Distance,0,0>}
object{
Round_Box(<-Axis_Distance-1,0,-0.5>,
<0.25,0.50, 0.5>, 0.025, 0)
texture{ pigment{ color rgb 0.2}
finish { diffuse 0.9 phong 1}
} // end of texture
translate<0,0.4,0>
} // end Round_Box
} //--------------------- end of Chassis
#end // ---------------------------------
object{ Chassis( 30 )
rotate<0,0,0>
translate<0,0,0>} |
|
|
|